

【導(dǎo)讀】隨著ToF在手機等終端市場的應(yīng)用爆發(fā),3D成像與傳感器市場成為風(fēng)口上的熱點。Yole預(yù)計全球3D成像和傳感市場將從2017年的21億美元增長至2023年的185億美元,復(fù)合年增長率高達44%。由于消費類市場的帶動(復(fù)合年增長率為82%),汽車電子(復(fù)合年增長率為35%)、工業(yè)和商業(yè)應(yīng)用(復(fù)合年增長率為12%)和其它高端市場也將進入快速增長通道。
而相比3D深度視覺其它兩種方案而言,當(dāng)前ToF方案在實際應(yīng)用中的表現(xiàn)出的優(yōu)勢讓市場看好在快速增長通道中ToF更大的機會。例如:在畫面拍攝后計算景深時不需要進行后處理,既可避免延遲又可節(jié)省采用強大后處理系統(tǒng)帶來的相關(guān)成本;ToF測距規(guī)模彈性大,大多數(shù)情況下只需改變光源強度、光學(xué)視野以及發(fā)射器脈沖頻率即可完成。
此外,由于具有不易受外界光干擾、體積小巧、響應(yīng)速度快以及識別精度高等多重優(yōu)勢,使得ToF無論是在移動端還是車載等應(yīng)用領(lǐng)域日漸成為3D視覺的首選技術(shù)方案。
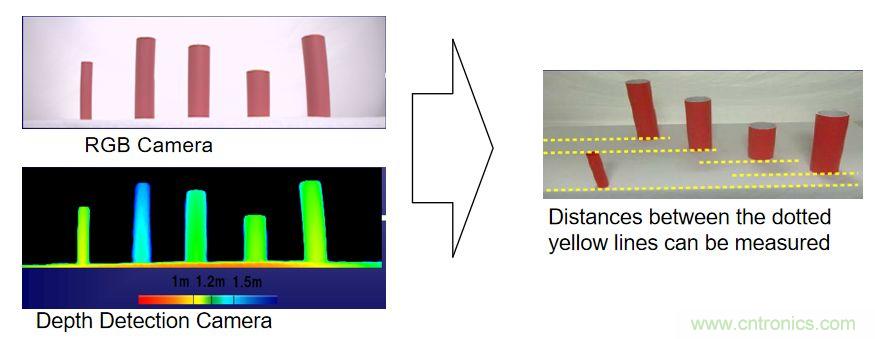
使用ToF技術(shù)可以得到物體的絕對值,更具性能優(yōu)勢
應(yīng)用全面鋪開,ToF迎來爆發(fā)增長
作為ToF創(chuàng)新應(yīng)用的主要廠商之一,ADI公司的ToF解決方案在vivo NEX相機中的成功應(yīng)用讓業(yè)界矚目,目前該公司相關(guān)解決方案更廣泛應(yīng)用到包括汽車、工業(yè)、便攜終端等多種應(yīng)用場景。最近ADI系統(tǒng)應(yīng)用工程經(jīng)理李佳在最近一場《ADI 3D深度檢測》的主題演講中形象的指出ToF正迎來全面開花、爆發(fā)式增長的機遇。她認(rèn)為主要有以下應(yīng)用機會:
自動化工廠中的各類機器人的自主避障將是ToF可以快速應(yīng)用的領(lǐng)域。機器人應(yīng)用日益在工業(yè)環(huán)境中普及的當(dāng)下,當(dāng)機器人身處較為擁擠的工作環(huán)境中,它們必須能辨認(rèn)人與機械以及機械的動作,并作出迅速的反應(yīng)以避免設(shè)備及工作人員受傷。如果以激光雷達來解決,成本則需要增加數(shù)萬元,用雙攝像頭方案又需要大量的運算和雙攝像頭精準(zhǔn)位置的調(diào)教,而ToF則成為解決上述難題的極具性價比的最佳選擇。
ToF實現(xiàn)人臉識別助力建筑智能升級。以具備人臉識別的ADI ToF 3D立體影像自動門解決方案為例,傳統(tǒng)自動門采用紅外線反射原理,只能檢測到是否有物體出現(xiàn)在感測范圍,導(dǎo)致動物也能自由進出商場,造成管理上困擾?;赥oF的方案可識別空間中的人類特征以及人與物體相對位置距離,避免非人類(例如動物)進入商業(yè)賣場。此外,商業(yè)空間的3D人流自動統(tǒng)計過去有成熟方案,但如何有效利用影像技術(shù),精準(zhǔn)分辨進出者的身高、體重,同時出入時間及高度誤差低于1%,這就有相當(dāng)技術(shù)門坎了,而ADI的ToF解決方案,有別于傳統(tǒng)3D人流方案,大多需要安裝至少二只立體相機,ADI的方案僅需一只ToF攝影鏡頭架,設(shè)于門框上方且沒有安裝高度限制。
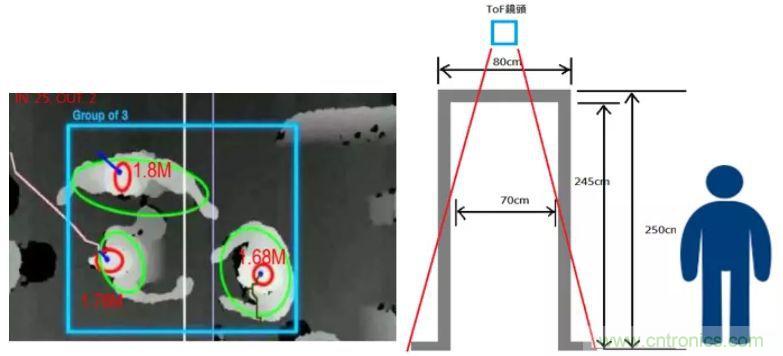
ToF應(yīng)用于3D 人流統(tǒng)計方案的情境虛擬圖
ToF汽車倒車影像增加汽車駕駛員輔助功能。結(jié)合影像傳感器和VGA ToF傳感器模塊與內(nèi)建圖像處理器,ADI公司汽車ToF解決方案能疊加實際影像,準(zhǔn)確測量物體與汽車的距離,相較于傳統(tǒng)超聲波感測方案,具備更佳的感測角度,能提供倒車系統(tǒng)更大范圍的碰撞偵測預(yù)防。
ToF應(yīng)用場景日益“擁擠”,如何避免干擾?
如此眾多的應(yīng)用場景為ToF打開了一個又一個風(fēng)口,但相關(guān)的困擾可能因而出現(xiàn)——同一場景下多個ToF應(yīng)用終端如何避免干擾?在年初的消費電子展上,ADI就做了這方面的展示和技術(shù)分析。
演示設(shè)置非常簡單,設(shè)置了兩個相互垂直的ToF攝像頭,每個攝像頭會顯示參與對象在三個維度上的角度,即高度、寬度以及最重要的深度。每種顏色代表不同的距離范圍,因此如果現(xiàn)場工作人員靠近攝像頭,手上的顏色就會發(fā)生變化。同樣,如果遠(yuǎn)離攝像頭,工作人員的身體會變成不同的顏色,這意味著距離變得更遠(yuǎn)。
這本身沒有什么了不起,因為CES展會上也展出了許多其他的3D攝像頭。但是在本演示中,ADI會展示多個ToF攝像頭面對面放置時不會相互干擾。
ToF攝像頭通過發(fā)射激光脈沖捕獲距離信息,然后測量反射脈沖返回攝像頭所需的時間,將反射時間乘以光速,即可獲得所需的距離或深度信息。問題是,如果存在與該激光器相同波長的其他光源,尤其是其他ToF攝像頭,測量將會受到干擾。因此,存在任何類型光干擾時測得的時間都不正確,這意味著計算所得的距離信息也不正確。

CES2019上展示的多TOF干擾消除技術(shù)的效果對比(右邊采用,左邊未采用)
您可以看到這種其他攝像頭帶來的干擾產(chǎn)生的影響。注意到在這張圖片中工作人員的顏色改變了,但這毫無意義,因為不同的顏色表示不同的距離,這是由于這個ToF攝像頭的激光脈沖反射到另一個ToF攝像頭,從而顯示出失真或錯誤的距離數(shù)據(jù)。
另一邊,這個攝像頭并未顯示這種失真,因為我們采用了一項正在申請專利的算法,它能夠避開或消除所有無關(guān)的光信息,僅使用自身激光源的光信息,所以能給出正確的深度信息。另一個攝像頭沒有采用此干擾消除算法,會出現(xiàn)失真,而這個攝像頭則不會出現(xiàn)失真。
總 結(jié)
隨著ToF在工業(yè)、無人機等領(lǐng)域的應(yīng)用,干擾導(dǎo)致的穩(wěn)定性考慮越發(fā)重要。而在消費端隨著各種應(yīng)用增多,設(shè)備間的干擾也將是實實在在的現(xiàn)實問題。假設(shè)有多架無人機在空中飛行,您當(dāng)然不希望它們發(fā)生碰撞,您希望無人機本身內(nèi)置回避功能,為此您就確實需要ToF功能。
同樣,一群人戴著AR眼鏡在同一個房間里玩游戲,多個自主式機器人在同一大型倉庫里分揀貨物,或者兩輛自動駕駛的汽車同時接近交叉路口,如果ToF攝像頭無法消除其他光源的干擾,那么使用ToF技術(shù)進行精確深度測量的應(yīng)用范圍將會嚴(yán)重受限。因此,ADI預(yù)計飛行時間系統(tǒng)中的防干擾或消除干擾能力將會越來越重要。
推薦閱讀:




