
【導(dǎo)讀】無(wú)人機(jī)系統(tǒng)以其機(jī)動(dòng)靈活、持久飛行和“零傷亡”等特點(diǎn)幾乎滲透到戰(zhàn)場(chǎng)空間的各個(gè)領(lǐng)域。近期幾次局部戰(zhàn)爭(zhēng)中無(wú)人機(jī)的突出表現(xiàn),更加引起了各國(guó)軍方,尤其是軍事強(qiáng)國(guó)的高度重視,已成為信息武器裝備體系的關(guān)鍵節(jié)點(diǎn)和重要組成部分,在信息支援、信息對(duì)抗和火力打擊等領(lǐng)域發(fā)揮著不可替代的作用。

與有人駕駛飛機(jī)相比,無(wú)人機(jī)的優(yōu)勢(shì)主要體現(xiàn)在以下五個(gè)方面:
一是可長(zhǎng)時(shí)間執(zhí)行空中任務(wù);
二是可替代有人駕駛飛機(jī)進(jìn)入核/生/化等污染環(huán)境執(zhí)行任務(wù);
三是不存在飛行員傷亡,政治和軍事風(fēng)險(xiǎn)較小;
四是由于不考慮人的因素,可承受更大的載荷,飛機(jī)的隱身和機(jī)動(dòng)性上可實(shí)現(xiàn)質(zhì)的飛躍;
五是全壽命費(fèi)用低、作戰(zhàn)效費(fèi)比高。與衛(wèi)星相比,無(wú)人機(jī)系統(tǒng)具有時(shí)效性、針對(duì)性和靈活性強(qiáng)等優(yōu)勢(shì)。
無(wú)人機(jī)的地位和作用
無(wú)人機(jī)是奪取信息權(quán)的有利工具
無(wú)人機(jī)能夠提供長(zhǎng)期持久的戰(zhàn)場(chǎng)信息支持服務(wù),可實(shí)時(shí)獲取和戰(zhàn)場(chǎng)信息,具有多維一體、全域覆蓋、持續(xù)實(shí)時(shí)、準(zhǔn)確精細(xì)的信息感知能力;不同類型不同高度的無(wú)人機(jī)系統(tǒng)組成了覆蓋戰(zhàn)場(chǎng)低空至臨近空間區(qū)域范圍的通訊、導(dǎo)航和定位等信息支持網(wǎng)絡(luò),形成靈活、機(jī)動(dòng)、多層次、立體化的空基和近天基綜合信息支持能力,提高了指揮的效率,增強(qiáng)了作戰(zhàn)的聯(lián)合性和靈活性。

無(wú)人機(jī)是未來(lái)戰(zhàn)場(chǎng)信息對(duì)抗的重要支柱
信息對(duì)抗,是指對(duì)敵方信息系統(tǒng)實(shí)施電子干擾、電子欺騙、電子誘餌、網(wǎng)絡(luò)攻擊、和反輻射摧毀。不同類別的無(wú)人機(jī)系統(tǒng)能夠滿足戰(zhàn)略、戰(zhàn)役、戰(zhàn)術(shù)多層次的信息對(duì)抗能力的需要,能夠提供“軟”“硬”不同類型的信息對(duì)抗手段,提供從戰(zhàn)術(shù)信息對(duì)抗支援到戰(zhàn)略戰(zhàn)役信息對(duì)抗打擊的作戰(zhàn)能力,實(shí)現(xiàn)對(duì)敵方信息系統(tǒng)全頻段、全時(shí)域、全天候的信息攻擊,形成多層次的信息作戰(zhàn)力量體系框架。
無(wú)人機(jī)將成為空中作戰(zhàn)的主導(dǎo)力量
無(wú)人機(jī)將具備時(shí)敏目標(biāo)察打能力、對(duì)敵縱深重要目標(biāo)精確打擊能力、臨近空間作戰(zhàn)能力和跨大氣層作戰(zhàn)能力,成為21世紀(jì)空中作戰(zhàn)的主導(dǎo)力量。在聯(lián)合作戰(zhàn)中,無(wú)人作戰(zhàn)飛機(jī)可執(zhí)行防空壓制任務(wù),協(xié)調(diào)各種力量對(duì)敵領(lǐng)土縱深實(shí)施打擊;無(wú)人機(jī)與地面和海上力量配合,可為地面和海上兵器指示目標(biāo)和實(shí)施火力校射,提高打擊精度;無(wú)人機(jī)還可以執(zhí)行戰(zhàn)斗求援、戰(zhàn)場(chǎng)管理、戰(zhàn)區(qū)導(dǎo)彈防御、反雷、心理戰(zhàn)等。

無(wú)人機(jī)是執(zhí)行最危險(xiǎn)任務(wù)的最佳選擇
高技術(shù)信息化戰(zhàn)爭(zhēng)使用精確制導(dǎo)武器的比重越來(lái)越大,核、生、化武器并存,殺傷力增大,參戰(zhàn)人員將面臨巨大危險(xiǎn)。因此,無(wú)人機(jī)能夠代替有人機(jī)執(zhí)行最危險(xiǎn)的任務(wù),最大限度地避免人員傷亡。
無(wú)人機(jī)的技術(shù)基礎(chǔ)
航空技術(shù)的發(fā)展是推動(dòng)無(wú)人機(jī)技術(shù)發(fā)展的基礎(chǔ)。無(wú)人機(jī)是依賴空氣動(dòng)力承載飛行的航空器,如何讓無(wú)人機(jī)能夠穩(wěn)定可靠飛行,性能越來(lái)越好,這依賴于航空技術(shù)的應(yīng)用和發(fā)展。
航空技術(shù)包括空氣動(dòng)力技術(shù)、飛行動(dòng)力學(xué)技術(shù)、航空結(jié)構(gòu)技術(shù)、航空材料技術(shù)、航空發(fā)動(dòng)機(jī)技術(shù)、飛行控制與導(dǎo)航技術(shù)、航空電子電氣技術(shù)等,早期的航空技術(shù)發(fā)展主要解決無(wú)人機(jī)等飛行器能夠飛行的問(wèn)題,現(xiàn)代航空技術(shù)的發(fā)展促進(jìn)無(wú)人機(jī)向飛行性能越來(lái)越高、飛行可靠性越來(lái)越好、執(zhí)行任務(wù)的能力越來(lái)越強(qiáng)的方向發(fā)展。
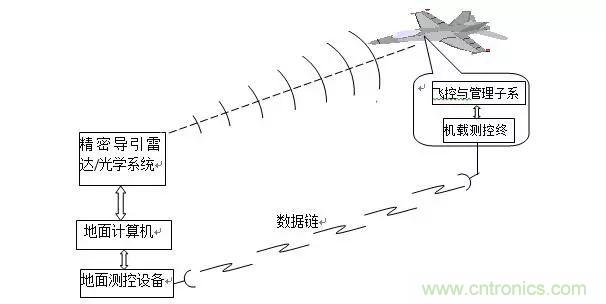
無(wú)線數(shù)據(jù)鏈技術(shù)的發(fā)展是推動(dòng)無(wú)人機(jī)向可用化和實(shí)用化發(fā)展的條件。由于無(wú)人機(jī)是機(jī)上無(wú)人駕駛,必須靠地面控制站通過(guò)無(wú)線數(shù)據(jù)鏈實(shí)現(xiàn)對(duì)其操縱控制和飛行狀態(tài)監(jiān)視,因此無(wú)線數(shù)據(jù)鏈?zhǔn)峭苿?dòng)無(wú)人機(jī)向可用化和實(shí)用化的條件?,F(xiàn)代數(shù)據(jù)鏈技術(shù)的發(fā)展使得無(wú)人機(jī)數(shù)據(jù)鏈向著高速、寬帶、保密、抗截獲、抗干擾能力強(qiáng)的方向發(fā)展,推動(dòng)無(wú)人機(jī)實(shí)用化能力越來(lái)越強(qiáng)。
無(wú)人機(jī)發(fā)展的主要關(guān)鍵技術(shù)
未來(lái)無(wú)人機(jī)向更高、更快、更遠(yuǎn)、更機(jī)動(dòng)、更高效的方向發(fā)展,需要的主要關(guān)鍵技術(shù)有:
1、平臺(tái)技術(shù)(綜合布局、氣動(dòng)、輕質(zhì)結(jié)構(gòu)、隱身);
2、大尺寸復(fù)合材料設(shè)計(jì)(規(guī)范)、加工工藝(成本);
3、結(jié)構(gòu)復(fù)合材料,抗紫外線材料,輕質(zhì)材料,耐高溫材料等;
4、微型加工裝配技術(shù)、智能材料的應(yīng)用(無(wú)舵面柔性機(jī)翼,微型、仿生無(wú)人機(jī));
5、先進(jìn)的發(fā)射回收技術(shù);
6、武器和設(shè)備的小型化及集成化;
7、隱身技術(shù);
8、動(dòng)力技術(shù);
9、通信技術(shù);
10、智能控制技術(shù);
11、空域管理技術(shù);
無(wú)人機(jī)飛行控制技術(shù)
飛行控制與管理系統(tǒng)是無(wú)人機(jī)的關(guān)鍵系統(tǒng)之一。飛行控制系統(tǒng)是無(wú)人機(jī)完成起飛(發(fā)射)、空中飛行、執(zhí)行任務(wù)、返場(chǎng)著陸(回收)等整個(gè)飛行過(guò)程的核心系統(tǒng),對(duì)無(wú)人機(jī)實(shí)現(xiàn)全權(quán)限控制與管理,因此對(duì)無(wú)人機(jī)的功能和性能起關(guān)鍵、決定性作用。如果沒(méi)有飛行控制系統(tǒng),現(xiàn)代無(wú)人機(jī)就不可能上天飛行,完成各種任務(wù)。
無(wú)人機(jī)飛行控制系統(tǒng)一般包含傳感器、機(jī)載計(jì)算機(jī)和伺服作動(dòng)設(shè)備三大部分。
無(wú)人機(jī)控制模式
無(wú)人機(jī)的飛行控制系統(tǒng)是全時(shí)限、全權(quán)限的,飛行控制模式可以分為程序控制(時(shí)間程序控制)、遙控(通過(guò)地面站遙控指令控制)和自主飛行控制(二維、三維或四維)三種。
前二種飛行控制方式常用作靶機(jī)、觀測(cè)等類型無(wú)人機(jī)的飛行控制,第三種常用于偵察機(jī)、攻擊機(jī)等類型無(wú)人機(jī)的飛行控制。
在遙控方式下,地面操作手根據(jù)無(wú)人機(jī)的狀態(tài)信息和任務(wù)要求控制無(wú)人機(jī)的飛行;
在自主控制方式下,飛行控制系統(tǒng)根據(jù)傳感器獲取的飛機(jī)狀態(tài)信息和任務(wù)規(guī)劃信息自動(dòng)控制無(wú)人機(jī)的飛行。
在半自主控制方式下,飛行控制系統(tǒng)一方面根據(jù)傳感器獲取的飛機(jī)狀態(tài)信息和任務(wù)規(guī)劃信息自主控制無(wú)人機(jī)的飛行,另一方面,接收地面控制站的遙控指令,改變飛行狀態(tài)。
機(jī)載傳感器
無(wú)人機(jī)飛控系統(tǒng)常用的傳感器包括角速率傳感器、姿態(tài)傳感器、航向傳感器、高度空速傳感器、飛機(jī)位置傳感器、迎角傳感器、過(guò)載傳感器等。傳感器的選擇應(yīng)根據(jù)實(shí)際系統(tǒng)的控制需要,在控制律初步設(shè)計(jì)與仿真的基礎(chǔ)上進(jìn)行。
1、角速率傳感器
角速率傳感器是飛控系統(tǒng)的基本傳感器之一,用于感受無(wú)人機(jī)繞機(jī)體軸的轉(zhuǎn)動(dòng)角速率,以構(gòu)成角速率反饋,改善系統(tǒng)的阻尼特性、提高穩(wěn)定性。
角速率傳感器的選擇要考慮其測(cè)量范圍、精度、輸出特性、帶寬等。
角速率傳感器應(yīng)安裝在無(wú)人機(jī)重心附近、一階彎振的波節(jié)處,安裝軸線與要感受的機(jī)體軸向平行,并特別注意極性的正確性。
2、姿態(tài)、航向傳感器
姿態(tài)傳感器用于感受無(wú)人機(jī)的俯仰和滾轉(zhuǎn)角度,航向傳感器用于感受無(wú)人機(jī)的航向角。姿態(tài)、航向傳感器是無(wú)人機(jī)飛行控制系統(tǒng)的重要組成部分,用于實(shí)現(xiàn)姿態(tài)航向穩(wěn)定與控制功能。
姿態(tài)、航向傳感器的選擇要考慮其測(cè)量范圍、精度、輸出特性、動(dòng)態(tài)特性等。
姿態(tài)、航向傳感器應(yīng)安裝在飛機(jī)重心附近,振動(dòng)盡可能要小,有較高的安裝精度要求。
對(duì)于磁航向傳感器要安裝在受鐵磁性物質(zhì)影響最小且相對(duì)固定的地方,安裝件應(yīng)采用非磁性材料制造。
3、高度、空速傳感器(或大氣數(shù)據(jù)計(jì)算機(jī))
高度、空速傳感器(或大氣數(shù)據(jù)計(jì)算機(jī))用于感受無(wú)人機(jī)的飛行高度和空速,是高度保持和空速保持的必備傳感器。一般和空速管、通氣管路構(gòu)成大氣數(shù)據(jù)系統(tǒng)。
高度、空速傳感器的選擇主要考慮測(cè)量范圍和測(cè)量精度。其安裝一般要求在空速管附近,盡量縮短管路。
4、飛機(jī)位置傳感器
飛機(jī)位置傳感器用于感受飛機(jī)的位置,是飛行軌跡控制的必要前提。慣性導(dǎo)航設(shè)備、GPS衛(wèi)星導(dǎo)航接收機(jī)是典型的位置傳感器。
飛機(jī)位置傳感器的選擇一般考慮與飛行時(shí)間相關(guān)的導(dǎo)航精度、成本和可用性等問(wèn)題。
慣性導(dǎo)航設(shè)備有安裝位置和較高的安裝精度要求,GPS接收機(jī)的安裝主要應(yīng)避免天線的遮擋問(wèn)題。
引導(dǎo)設(shè)備
精確引導(dǎo)是無(wú)人機(jī)自動(dòng)著陸的基礎(chǔ)。由于使用簡(jiǎn)易的機(jī)場(chǎng),顯然不可能使用一般的儀表著陸系統(tǒng)或者微波著陸系統(tǒng)。在此前提下,還有如下方法可供選擇。
1) 全球定位系統(tǒng)(GPS):GPS是目前為止定位精度最高的導(dǎo)航設(shè)施,在世界各國(guó)有著廣泛的應(yīng)用。GPS作為精密進(jìn)場(chǎng)著陸引導(dǎo)系統(tǒng)時(shí)必須與INS和無(wú)線電高度表相組合。因?yàn)镚PS易受美國(guó)的制約,不宜對(duì)其過(guò)分依賴。
2) 區(qū)域定位系統(tǒng)(RPS):區(qū)域定位系統(tǒng)(RPS)通過(guò)在地面一定區(qū)域內(nèi)放置4~6個(gè)在功能上相當(dāng)于定位衛(wèi)星的設(shè)備(可稱為偽衛(wèi)星)來(lái)實(shí)現(xiàn)對(duì)空中目標(biāo)的定位。
3) 地面輔助引導(dǎo)設(shè)施:通過(guò)地面的精密光學(xué)系統(tǒng)或者導(dǎo)引雷達(dá)對(duì)飛機(jī)定位,再由上行數(shù)據(jù)鏈將定位信息傳給飛控計(jì)算機(jī)。
4) 視見(jiàn)引導(dǎo):利用無(wú)人機(jī)上光電設(shè)備(此時(shí)應(yīng)鎖定在一定的角度上)實(shí)時(shí)拍攝的機(jī)場(chǎng)景象迭加無(wú)人機(jī)的姿態(tài)、航向、空速、高度等信息,形成類似于有人機(jī)上的平顯畫面,并結(jié)合機(jī)場(chǎng)人員對(duì)于無(wú)人機(jī)的目視結(jié)果,人工引導(dǎo)飛機(jī)進(jìn)場(chǎng)著陸。
伺服機(jī)構(gòu)
伺服作動(dòng)設(shè)備也稱舵機(jī),是飛控系統(tǒng)的執(zhí)行部件。其作用在于接收飛行控制指令,進(jìn)行功率放大,并驅(qū)動(dòng)舵面或發(fā)動(dòng)機(jī)節(jié)風(fēng)門偏轉(zhuǎn),從而達(dá)到控制無(wú)人機(jī)姿態(tài)和軌跡的目的。
伺服作動(dòng)設(shè)備可分為電動(dòng)伺服作動(dòng)設(shè)備、液壓伺服作動(dòng)設(shè)備和電液混合伺服作動(dòng)設(shè)備。無(wú)人機(jī)上通常使用電動(dòng)伺服作動(dòng)設(shè)備。
飛行控制律
飛行控制律是飛行控制系統(tǒng)一個(gè)重要組成部分,它是指令及各種外部信息到飛機(jī)各執(zhí)行機(jī)構(gòu)的一種映射關(guān)系。飛行控制律的設(shè)計(jì)就是確定這種映射關(guān)系,使飛機(jī)在整個(gè)飛行包線內(nèi)具有符合系統(tǒng)要求的飛行品質(zhì)。飛行控制律設(shè)計(jì)的依據(jù)是系統(tǒng)研制任務(wù)合同及相關(guān)頂層技術(shù)文件。根據(jù)這些文件具體形成在具有控制系統(tǒng)下飛機(jī)的各種品質(zhì)或性能,在對(duì)無(wú)控飛機(jī)的特性進(jìn)行分析的基礎(chǔ)上,為達(dá)到所要求的飛行品質(zhì)或性能,確定初步的控制律結(jié)構(gòu),然后應(yīng)用自動(dòng)控制的設(shè)計(jì)方法具體確定控制律參數(shù)。通過(guò)非線性全量仿真、半物理仿真及飛行試驗(yàn),驗(yàn)證或調(diào)整控制律結(jié)構(gòu)及參數(shù),使飛行品質(zhì)或性能達(dá)到要求??刂坡稍O(shè)計(jì)過(guò)程是一個(gè)迭代回歸的過(guò)程。
控制律結(jié)構(gòu)
首先應(yīng)明確飛機(jī)的控制面。一般控制面由升降舵、副翼、方向舵、襟翼、鴨翼、減速板等。根據(jù)對(duì)無(wú)人機(jī)的性能要求及無(wú)控?zé)o人機(jī)的特性確定控制律結(jié)構(gòu)??刂坡砂v向控制律和橫航向控制律。根據(jù)無(wú)人機(jī)的任務(wù)要求,選擇以下控制律結(jié)構(gòu)。
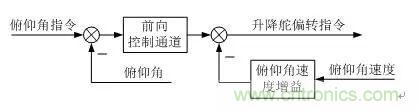
俯仰角穩(wěn)定與控制
俯仰角穩(wěn)定與控制回路一般需要俯仰角及俯仰角速度反饋信號(hào),其一般控制律結(jié)構(gòu)如圖所示。
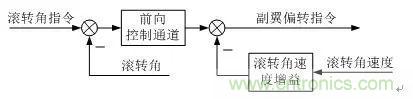
滾轉(zhuǎn)角穩(wěn)定及控制
滾轉(zhuǎn)角穩(wěn)定與控制回路一般需要滾轉(zhuǎn)角及滾轉(zhuǎn)角速度反饋信號(hào),其一般控制律結(jié)構(gòu)如圖所示。
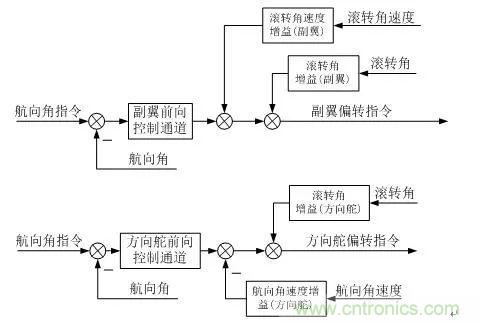
航向穩(wěn)定與控制
航向角穩(wěn)定與控制一般結(jié)構(gòu)如圖。其中,控制結(jié)構(gòu)通過(guò)副翼進(jìn)行航向控制,具有較高的控制效率,但控制中側(cè)滑角較大;利用方向舵進(jìn)行航向控制,該形式的控制效率較低,所引入的滾轉(zhuǎn)角反饋用于部分消除側(cè)滑角;利用副翼和方向舵聯(lián)合控制航向角,具有控制效率高及側(cè)滑角小的特點(diǎn)。
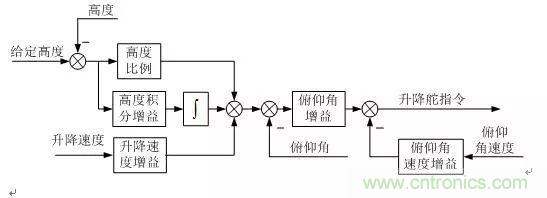
高度控制
高度控制由俯仰內(nèi)回路及外回路組成。俯仰內(nèi)回路一般由俯仰角和俯仰角速度反饋組成,高度控制的外回路一般采用比例+積分+微分的形式,如圖所示。
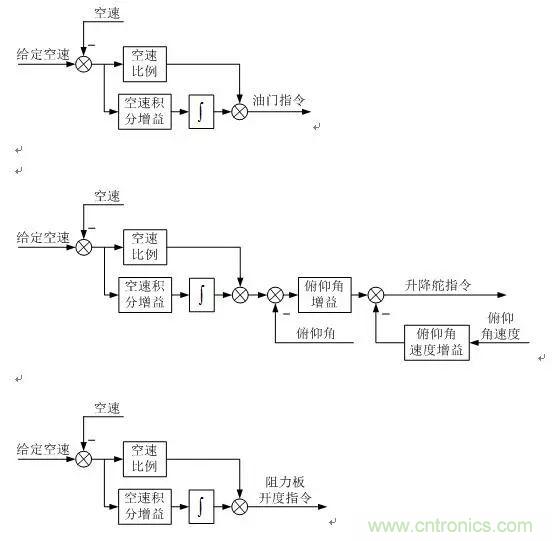
空速控制
空速控制分為節(jié)風(fēng)門空速控制、俯仰空速控制和阻力空速控制。節(jié)風(fēng)門空速控制通過(guò)調(diào)節(jié)發(fā)動(dòng)機(jī)節(jié)風(fēng)門實(shí)現(xiàn)空速的控制,俯仰空速控制通過(guò)升降舵偏轉(zhuǎn)使飛機(jī)攻角變化,從而改變飛機(jī)空氣動(dòng)力實(shí)現(xiàn)空速的控制,阻力空速控制通過(guò)阻力板的偏轉(zhuǎn)改變阻力實(shí)現(xiàn)空速的控制。
由于發(fā)動(dòng)機(jī)一般具有較大的時(shí)間延遲,因此節(jié)風(fēng)門空速控制一般相對(duì)緩慢,俯仰空速控制和阻力空速控制具有響應(yīng)相對(duì)快的特點(diǎn)。
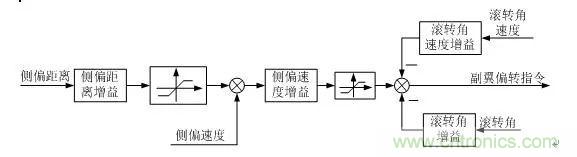
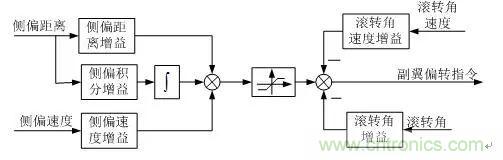
側(cè)向偏離控制
側(cè)向偏離控制可實(shí)現(xiàn)側(cè)向航跡控制。側(cè)向偏離控制一般通過(guò)飛機(jī)的滾轉(zhuǎn)控制實(shí)現(xiàn),它由滾轉(zhuǎn)內(nèi)回路和側(cè)偏外回路組成。側(cè)偏距離為相對(duì)于期望航線的距離,即期望航線與實(shí)際航線之差。有差控制一般用于巡航飛行階段,無(wú)差控制主要用于精確控制階段,如著陸。
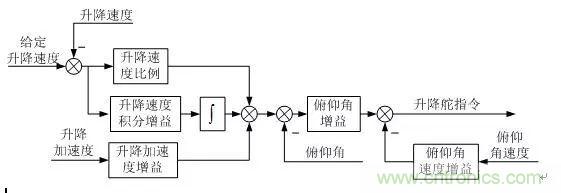
升降速度控制
升降速度控制一般用于自動(dòng)輪式著陸的拉平階段,其控制結(jié)構(gòu)由俯仰內(nèi)回路和升降速度外回路組成,如圖所示。
無(wú)人機(jī)數(shù)據(jù)鏈技術(shù)
數(shù)據(jù)鏈?zhǔn)菬o(wú)人機(jī)系統(tǒng)的主要組成部分之一。設(shè)計(jì)涉及到遙控遙測(cè)、跟蹤定位、圖像傳輸、微波通信、衛(wèi)星通信、抗干擾通信、天線伺服、自動(dòng)控制和計(jì)算機(jī)應(yīng)用等多個(gè)技術(shù)領(lǐng)域,是一項(xiàng)復(fù)雜的信息系統(tǒng)工程。
數(shù)據(jù)鏈功能
1、對(duì)無(wú)人機(jī)及機(jī)載任務(wù)設(shè)備的遙控;
2、對(duì)無(wú)人機(jī)及機(jī)載設(shè)備的遙測(cè);
3、對(duì)無(wú)人機(jī)的跟蹤定位;
4、對(duì)無(wú)人機(jī)偵察信息的實(shí)時(shí)傳輸與處理。
遙控技術(shù)
遙控是無(wú)人機(jī)數(shù)據(jù)鏈必備的功能,用于實(shí)現(xiàn)對(duì)無(wú)人機(jī)和任務(wù)設(shè)備的遠(yuǎn)距離操作。來(lái)自地面操縱臺(tái)或操縱器的指令和數(shù)據(jù),經(jīng)編碼、上行(測(cè)控站到無(wú)人機(jī))無(wú)線信道傳輸和解碼,送給機(jī)上飛行控制計(jì)算機(jī)(或直接)對(duì)無(wú)人機(jī)和任務(wù)設(shè)備實(shí)施操作。
在現(xiàn)代先進(jìn)的無(wú)人機(jī)系統(tǒng)中,遙控的作用可歸納如下:
1、對(duì)無(wú)人機(jī)飛行的遠(yuǎn)距離操縱;
2、對(duì)無(wú)人機(jī)機(jī)載設(shè)備的遠(yuǎn)距離控制;
3、上行測(cè)距碼的傳輸;
4、供無(wú)人機(jī)導(dǎo)航用的數(shù)據(jù)(包括航路設(shè)置或修改數(shù)據(jù)、測(cè)控站位置、由測(cè)控站測(cè)定的無(wú)人機(jī)位置、差分GPS修正數(shù)據(jù)等)的上行傳輸。
遙控對(duì)于無(wú)人機(jī)來(lái)說(shuō)非常重要,其可靠性、抗干擾和抗截獲能力等應(yīng)充分重視。遙控指令和數(shù)據(jù)的傳輸一般在較低碼速率下進(jìn)行,保證足夠的信道電平并不困難。提高設(shè)計(jì)余度可以增加遙控的可靠性,通過(guò)擴(kuò)頻或跳頻以及數(shù)據(jù)加密能增加遙控的抗干擾和抗截獲能力。
遙測(cè)技術(shù)
遙測(cè)是了解無(wú)人機(jī)狀態(tài)和對(duì)其實(shí)施遙控的必要監(jiān)測(cè)手段。來(lái)自機(jī)上飛行控制計(jì)算機(jī)或直接來(lái)自機(jī)上各部分的遙測(cè)數(shù)據(jù)(包括飛行狀態(tài)傳感器的數(shù)據(jù)和機(jī)載設(shè)備狀態(tài)的檢測(cè)數(shù)據(jù)),經(jīng)編碼、下行(無(wú)人機(jī)到測(cè)控站)無(wú)線信道傳輸和解碼,傳回到測(cè)控站,通過(guò)數(shù)據(jù)綜合顯示,能夠?qū)崟r(shí)觀察無(wú)人機(jī)的飛行狀態(tài),以及任務(wù)設(shè)備的工作狀態(tài)。操縱人員借助這些數(shù)據(jù)可以方便地對(duì)無(wú)人機(jī)及其任務(wù)設(shè)備進(jìn)行操縱,完成各種任務(wù)。借助下行遙測(cè)信道,還可以實(shí)現(xiàn)測(cè)控站天線對(duì)無(wú)人機(jī)的跟蹤,測(cè)出無(wú)人機(jī)的方位角。通過(guò)遙測(cè)傳回的測(cè)距碼,與發(fā)送的測(cè)距碼進(jìn)行比對(duì),能夠完成無(wú)人機(jī)相對(duì)測(cè)控站的斜距測(cè)量。由方位角和斜距,再利用遙測(cè)傳回的高度數(shù)據(jù),就能夠確定無(wú)人機(jī)相對(duì)測(cè)控站的位置。
在現(xiàn)代先進(jìn)的無(wú)人機(jī)系統(tǒng)中,遙測(cè)的作用為:
1、下行傳輸無(wú)人機(jī)的各種飛行狀態(tài)數(shù)據(jù);
2、下行傳輸無(wú)人機(jī)的機(jī)載設(shè)備狀態(tài)數(shù)據(jù);
3、下行傳輸測(cè)距碼,實(shí)現(xiàn)對(duì)無(wú)人機(jī)的測(cè)距;
4、提供測(cè)控站跟蹤測(cè)角的信標(biāo)。
遙測(cè)對(duì)于無(wú)人機(jī)來(lái)說(shuō)也是非常重要,數(shù)據(jù)傳輸?shù)腻e(cuò)誤會(huì)給操作人員造成誤導(dǎo),可能導(dǎo)致誤操作而出現(xiàn)事故。無(wú)人機(jī)遙測(cè)的設(shè)計(jì)應(yīng)重視數(shù)據(jù)的傳輸質(zhì)量。遙測(cè)數(shù)據(jù)速率可能與遙控?cái)?shù)據(jù)相近或稍高一些,保證足夠的信道電平也并不困難。通常采取糾錯(cuò)編碼等措施提高遙測(cè)數(shù)據(jù)的傳輸質(zhì)量。
跟蹤定位技術(shù)
跟蹤定位是指連續(xù)和實(shí)時(shí)地提供無(wú)人機(jī)的位置數(shù)據(jù)。這既是操縱無(wú)人機(jī)的要求,也是對(duì)偵察目標(biāo)進(jìn)行定位的需要。
對(duì)于能自主飛行的無(wú)人機(jī),利用遙測(cè)將機(jī)上導(dǎo)航定位數(shù)據(jù)實(shí)時(shí)傳回測(cè)控站,就可實(shí)現(xiàn)對(duì)無(wú)人機(jī)的跟蹤定位。然而,在有些不能完全依賴機(jī)上導(dǎo)航定位的情況下,則需要由測(cè)控站對(duì)無(wú)人機(jī)進(jìn)行測(cè)角和測(cè)距,確定無(wú)人機(jī)與測(cè)控站的相對(duì)位置,再結(jié)合測(cè)控站本身的位置,就可實(shí)現(xiàn)對(duì)無(wú)人機(jī)的跟蹤定位。有時(shí)還可以將機(jī)上導(dǎo)航定位數(shù)據(jù)和測(cè)控站測(cè)量數(shù)據(jù)融合,這種組合定位方法既增加了余度,又有利于提高定位精度。
對(duì)于遠(yuǎn)距離飛行的無(wú)人機(jī),測(cè)控站天線一般采用高增益定向天線。這樣,既有利于增加信號(hào)電平,又有利于提高下行信道的抗干擾能力。如果這種高增益定向天線能自動(dòng)跟蹤無(wú)人機(jī),即具有了跟蹤測(cè)角能力,那么再結(jié)合測(cè)距功能就可實(shí)現(xiàn)對(duì)無(wú)人機(jī)的跟蹤定位。
由于無(wú)人機(jī)飛行高度相對(duì)較低,無(wú)人機(jī)對(duì)測(cè)控站的仰角較小,而且無(wú)人機(jī)自身大都配備有高度傳感器,故多數(shù)情況下無(wú)需測(cè)定俯仰角,在俯仰方向以手動(dòng)或數(shù)字引導(dǎo)方式完成跟蹤即可,這有利于降低系統(tǒng)的復(fù)雜程度。
信息傳輸技術(shù)
無(wú)人機(jī)信息傳輸就是通過(guò)下行無(wú)線信道向測(cè)控站傳送由機(jī)載任務(wù)傳感器所獲取的視頻偵察信息。視頻偵察信息分圖像偵察和電子偵察兩種信息。圖像偵察信息的信號(hào)形式因圖像傳感器類型有所區(qū)別,有電視攝像機(jī)的模擬或數(shù)字電視信號(hào),有成像雷達(dá)或行掃式攝像機(jī)的圖片數(shù)據(jù)信號(hào)。電子偵察信息則是帶限模擬信號(hào)。
信息傳輸是無(wú)人機(jī)系統(tǒng)完成偵察任務(wù)的關(guān)鍵。傳輸質(zhì)量的好壞直接關(guān)系到發(fā)現(xiàn)和識(shí)別目標(biāo)的能力。偵察信息要求有比遙控和遙測(cè)數(shù)據(jù)高得多的傳輸帶寬(一般要幾兆赫,最高的可達(dá)幾十兆赫,甚至上百兆赫)。因此,視頻偵察信息傳輸信道設(shè)計(jì)往往是無(wú)人機(jī)無(wú)線信道設(shè)計(jì)最困難的部分。為了簡(jiǎn)化系統(tǒng),視頻信息傳輸和遙測(cè)可共用一個(gè)信道。
本文轉(zhuǎn)載自傳感器技術(shù)mp。
推薦閱讀:





