
【導(dǎo)讀】不知道你有沒有發(fā)現(xiàn),原來覺得還很遙遠(yuǎn)的自動駕駛,這個字眼卻越來越多地在我們的生活中出現(xiàn),現(xiàn)在量產(chǎn)的新車上如果沒有一些ADAS的配置都不好意思拿出手。說過了那么多理論,讓我們看一下,ADAS開起來怎么樣?
但是,我們有沒有仔細(xì)想過,自動駕駛的最終奧義到底是什么?在目前的人機(jī)交互的過程中,機(jī)器與人類如何更好的結(jié)合來帶給我們恰到好處的體驗(yàn)其實(shí)是更重要的問題,而不是一味地去追求多么高的自動化程度。這也是無論從技術(shù)角度還是社會角度,目前人類駕駛與自動駕駛疊交階段最需要解決的問題。車云菌下面就在目前的量產(chǎn)車中大致分了幾個階段來說一說。
一:初見端倪
首先,這里所謂的第一個階段其實(shí)在幾年前就已經(jīng)比較常見了,最主要的功能基本就是定速巡航。這算是各家對于ADAS功能應(yīng)用的最先嘗試,所以也是領(lǐng)先其他功能進(jìn)入人們視野的,大約在十年前左右,豪華品牌中就開始出現(xiàn),之后逐步普及到合資以及自主品牌上。
從技術(shù)上來說,定速巡航只是簡單地通過電腦來控制發(fā)動機(jī)的供油量、節(jié)氣門開度等來起到穩(wěn)住油門踏板的作用。使用同樣的技術(shù)也可以很容易將其擴(kuò)展到限速控制。使用比較簡單,通過開啟/關(guān)閉、設(shè)定/恢復(fù)、加減速度等按鍵就可以激活定速巡航。不過由于當(dāng)時大多數(shù)汽車的儀表盤顯示屏都比較老,不像現(xiàn)在許多的TFT屏、甚至全液晶儀表可以顯示的內(nèi)容那么豐富,所以大多數(shù)都沒有在儀表上直觀體現(xiàn)當(dāng)前定速的速度顯示。
其實(shí)車云菌覺得這一初級階段的定速巡航更像是幫助鎖定當(dāng)前車速、并可以進(jìn)行后續(xù)速度調(diào)整的功能。你無法在車速80km/h的時候?qū)⑺O(shè)定在120km/h巡航,只能在當(dāng)前車速下進(jìn)行鎖定,而且當(dāng)你快速調(diào)整車速之后,在車速穩(wěn)定下來之前你并不知道剛才設(shè)定的確切速度。另外,當(dāng)前方遇到慢車踩剎車推出定速巡航之后,恢復(fù)速度時,當(dāng)年的調(diào)教也許為了更快地達(dá)到之前的預(yù)設(shè)速度,往往發(fā)動機(jī)會一陣轟鳴急加速,這時候不僅會顯得有些突兀,也不那么經(jīng)濟(jì)。
所以,這種普通的定速巡航只是適用于車況較少的高速道路,更多地作為長時間駕駛時緩解腳部疲勞的一個功能。作為跟它長時間接觸更多的車主,車云菌只有在平時的高速上才會階段性的使用一下,假期的高速上車流一增加,它的便利性就不那么突出了,還不如自己控制。當(dāng)然,以現(xiàn)在的眼光來看,似乎是落后、雞肋了一點(diǎn),不過在推出之時消費(fèi)者還是比較激動的,畢竟是首次對自動化駕駛的嘗試。
二:解放雙腳
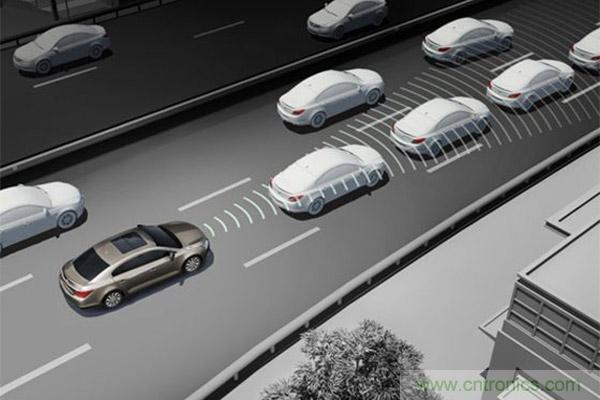
這一檔次我們基本囊括了目前大多數(shù)主流駕駛輔助系統(tǒng)中的功能,車云菌將其稱之為“用手開車”的階段,以自適應(yīng)巡航、車道保持系統(tǒng)、主動剎車等為主,在許多情況下已經(jīng)可以基本實(shí)現(xiàn)解放雙腳、僅靠雙手駕駛。
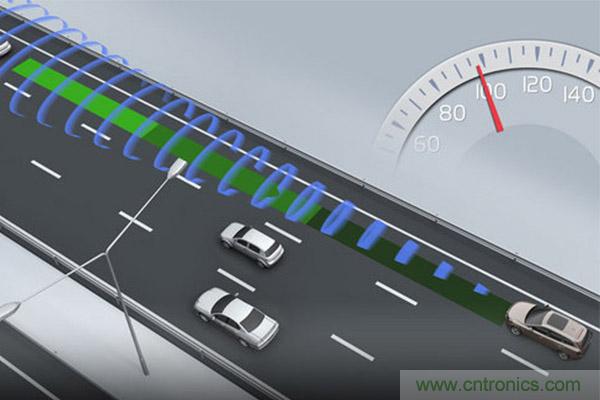
自適應(yīng)巡航,顧名思義,在上一階段定速巡航的基礎(chǔ)上,通過雷達(dá)探測前方車輛自動調(diào)整速度,是這一階段最實(shí)用、貢獻(xiàn)最大的功能。當(dāng)你設(shè)置到一定的速度之后,前車慢你也跟著慢,前車快你也跟著快,直到達(dá)到限速。你所需要做的只是握住方向盤,偶爾根據(jù)路況調(diào)整一下設(shè)定速度或變道,即使是在城市環(huán)路上完全不需要雙腳,這就是為什么車云菌會形容它為用手開車。

而且,與之前定速巡航普遍要到時速60km或80km以上才能工作相比,自適應(yīng)巡航可以將激活的最低速度大大降低,比如福特的20km/h、通用的25km/h、大眾的30km、雷克薩斯的40km/h等等(這些數(shù)據(jù)隨著廠商的系統(tǒng)不斷更新會有一定變化),基本開起來只要不是嚴(yán)重?fù)矶戮涂梢詫?shí)現(xiàn)。
而且諸如通用、大眾、寶馬、奧迪、Jeep等,都已經(jīng)可以做到跟車stop & go,即使前方忽然出現(xiàn)擁堵、車速低于激活功能的最低車速了也不用擔(dān)心,系統(tǒng)會自動根據(jù)前車剎停,并在短時間內(nèi)前(普遍為幾秒鐘)車起步后可以實(shí)現(xiàn)繼續(xù)自動跟車(不過如果長時間停車,再起步時便需要駕駛員輕點(diǎn)一下油門),依然是可以不用腳。

但是需要注意的是,在國內(nèi)路況下,旁邊車道緊急變道或加塞的情況依然時有發(fā)生,理論上自適應(yīng)巡航結(jié)合主動剎車輔助是可以防止碰撞的,但有事由于事發(fā)突然,雷達(dá)和攝像頭可能無法百分之百探測成功,我們?nèi)孕枰獣r刻注意力保持集中觀察兩側(cè)車輛,及時進(jìn)行人工干預(yù)。
另外,像車道保持系統(tǒng),除了大部分車輛都可以實(shí)現(xiàn)的儀表盤指示燈閃爍(+聲音報警)之外,像通用可以實(shí)現(xiàn)座椅震動+轉(zhuǎn)向輕微干預(yù)、寶馬和奔馳會方向盤震動等等。這樣就在我們疲勞或分神的時候,可以最后助你一臂之力。
這一級別的ADAS可以算是目前量產(chǎn)車中的主流配置,依然是更加適用于高速路況,以及部分環(huán)路、高架等城市快速路,基本上實(shí)現(xiàn)了解放雙腳的目的,大大減輕了腳部的疲勞感,長途旅行也不再那么煎熬。相比上一個階段,實(shí)用性明顯上了一個臺階,不過應(yīng)對更加復(fù)雜的路況仍然有難度,城市駕駛依然是軟肋。
三:更進(jìn)一步
也許你會覺得有些在ADAS方面頗有建樹的品牌似乎沒在前面出現(xiàn)過,比如特斯拉、奔馳、沃爾沃等,這是因?yàn)檐囋凭阉鼈兎诺搅诉@一更高的階段。這一階段相比前面最大的變化就是針對相對弱勢的城市駕駛中,加入了更多的功能支持。
拿特斯拉、奔馳、沃爾沃這三家來說,首先,自適應(yīng)巡航的加速減速的過程都更加平緩,沒有了機(jī)械操作的生硬。另外,在自適應(yīng)巡航的基礎(chǔ)上都加入了自動超車的功能,當(dāng)然也不是完全自動,你仍需要打開轉(zhuǎn)向燈,之后車輛會自動監(jiān)測左后方的交通狀況,在安全的情況下自動完成變道并維持設(shè)定的車速。另外,在跟車功能上也都更加高級,不僅可以自動識別車道,同樣可以根據(jù)前車行駛軌跡進(jìn)行跟車。而一旦目前的路況條件不滿足自動駕駛的條件之后,系統(tǒng)就會切換回人工駕駛模式,而如果駕駛員沒有進(jìn)行相應(yīng)的操作,車輛就會減速停車。
比如特斯拉的AutoPilot系統(tǒng),目前已經(jīng)更新到8.1版本,在自適應(yīng)巡航方面,除了根據(jù)車道線保持行駛路線之外,如果車道不清晰或者沒有車道線的時候,系統(tǒng)會根據(jù)前車軌跡進(jìn)行跟車。也就是說,如果前車突然忽然躲過了路面上的一個什么障礙物,特斯拉也是可以跟著躲過的。即使是前車不守規(guī)矩亂變道,車身四周的雷達(dá)也會探測周圍的車輛,一旦距離過近也會立即停止自動駕駛功能。而且最直觀的是,特斯拉可以將周圍的車輛實(shí)時動態(tài)地顯示在儀表盤上,哪輛車離你近了離你遠(yuǎn)了你都可以看到。另外,AutoPilot是目前唯一可以通過OTA在線升級的車載系統(tǒng),就像手機(jī)更新一樣。

特斯拉AutoPilot
奔馳的Drive Pilot系統(tǒng)開啟自適應(yīng)巡航之后,在車輛時速介于80-180km之間時,如果你打開轉(zhuǎn)向燈,兩秒之后主動變道輔助系統(tǒng)就會介入,當(dāng)然也是在傳感器探測到左后方?jīng)]有其他車輛、駛?cè)雲(yún)^(qū)域安全的情況下,操縱車輛駛?cè)胂噜徿嚨?。而如果道路?biāo)線并不清晰、系統(tǒng)無法準(zhǔn)確判斷車道,主動變道輔助系統(tǒng)便不會介入工作,確保變道的安全性。系統(tǒng)在整個過程中的操作都非常平順柔和,算是最接近人工駕駛感覺的自動駕駛了,這也與目前奔馳應(yīng)用的新E級、S級的定位相對應(yīng),坐在后排的老板幾乎無法察覺到底是誰在開車。另外,在最新的系統(tǒng)中,攝像頭可以實(shí)時捕捉道路上的限速標(biāo)志,并自動應(yīng)用到巡航當(dāng)中,將車速限制在當(dāng)前道路的限速一下,防止超速。

奔馳Drive Pilot
沃爾沃的Pilot Assist系統(tǒng)中最主要的兩個功能就是排隊(duì)輔助和自適應(yīng)巡航,相比起來最大的優(yōu)勢就是它的排隊(duì)輔助功能。兩功能以時速50km來分開,速度比50km/h低的時候,激活排隊(duì)輔助系統(tǒng),車輛可以根據(jù)車道線和前車來自動進(jìn)行加速、減速和一定程度的轉(zhuǎn)向。系統(tǒng)會同時監(jiān)測車道線和前車行駛軌跡,在跟車的時候也會隨前車在車道內(nèi)左右移動。此在這個過程中,系統(tǒng)會不時提醒你對方向進(jìn)行糾正,儀表盤、抬頭顯示以及聲音都會有提示,此時你只需要很輕地將手在方向盤上放一下即可。而當(dāng)車輛跟隨前車停車超過3秒,再次行進(jìn)時需要你輕輕點(diǎn)一下油門。這是目前市面上所有車?yán)锩嫣幚淼退俣萝嚶窙r表現(xiàn)最好的系統(tǒng)了,也是應(yīng)對堵車最好用的系統(tǒng)。

沃爾沃Pilot Assist
當(dāng)車速逐漸提升到了50km/h,即使前方一片開闊,車速也不會再繼續(xù)增加,但儀表盤會提示你切換至自適應(yīng)巡航。兩項(xiàng)功能均可以通過方向盤左邊的按鍵區(qū)域完成操作,不需要長按、雙擊等手法,操作非常簡單,一鍵就可以完成切換。自適應(yīng)巡航同樣可以完成輕微的隨車道轉(zhuǎn)向,而且最新的系統(tǒng)已經(jīng)將實(shí)現(xiàn)這一功能的速度上限提高了130km/h。無論是排隊(duì)輔助還是自適應(yīng)巡航,雖然說不能完全將駕駛權(quán)放心地交給車輛的駕駛輔助系統(tǒng),但也已經(jīng)基本可以解放雙腳甚至雙手了,尤其在堵車的時候,駕駛疲勞感基本可以被降低一大半。
除了上面這幾個我們可以切實(shí)看得見摸得著的,像奧迪、寶馬、福特這些大廠當(dāng)然也都在做著類似的技術(shù)研發(fā),許多功能在測試車上也都可以實(shí)現(xiàn),只不過都還沒有真正投入量產(chǎn),或者說還沒有真正進(jìn)入到國內(nèi)市場中。所以這也是為什么我們說特斯拉、奔馳、沃爾沃得以能夠相對領(lǐng)先的原因。

通用自適應(yīng)巡航及車道偏離輔助
總的來說,這一階段距離完全的自動駕駛更近了。與此前最大的區(qū)別就是,前面的功能實(shí)現(xiàn)可以說依然是以人工駕駛為主、駕駛輔助功能為輔的,但是這一階段中我們可以看到自動駕駛系統(tǒng)做的工作的比重占了更多,甚至在駕駛過程中以系統(tǒng)為主,我們需要做的是謹(jǐn)防一些系統(tǒng)漏檢的意外出現(xiàn),比如側(cè)前方的障礙物(這也是導(dǎo)致特斯拉幾次事故的主要原因之一)、突然出現(xiàn)的加塞車輛等。
不過如果說只讓你放開雙腳,也許還可以接受,但同時徹底放開收腳難免就會比較緊張和忐忑了,當(dāng)然主機(jī)廠目前基本也是建議雙手不要離開方向盤。不過當(dāng)你慢慢習(xí)慣了這些功能、與車輛建立了一定的信任之后,保持注意力的集中,其實(shí)還是可以比較自如地控制的。雖然仍無法像電影里一樣實(shí)現(xiàn)起點(diǎn)到終點(diǎn)的完全自動駕駛,但至少出了小區(qū)上了大路就幾乎不用管了,需要人為干預(yù)的情況也相對更少,雖然不能直接在車?yán)锼X,但至少在車上可以放心地喝杯咖啡了。這就在人機(jī)之間建立了一定程度的信任和交互,已經(jīng)有了未來完全自動駕駛的雛形。
四:科技巨頭
供應(yīng)商以及科技公司下的自動駕駛,比如谷歌、大陸、德爾福、Uber、NuTonomy等等。這一部分中,汽車與科技的結(jié)合是最緊密的,也是各種創(chuàng)新技術(shù)應(yīng)用最多的,但同時也都停留在測試階段,能明顯看出與傳統(tǒng)車廠研發(fā)過程中的一些不同。
谷歌是科技巨頭里面最早進(jìn)軍自動駕駛領(lǐng)域的,從2009年開始,谷歌便一直在美國境內(nèi)以及世界各地進(jìn)行自動駕駛的測試,在向美國DMV提交的報告中,谷歌的測試路程也遠(yuǎn)遠(yuǎn)領(lǐng)先于其他公司。除了大量使用的改造后的雷克薩斯RX,谷歌的“豆莢車”其實(shí)更讓人們好奇,美國加州的山景城就是它經(jīng)常出沒的地方。

谷歌“豆莢車”
“豆莢車”除了它萌萌的外形,沒有方向盤和踏板是它最大的特點(diǎn),也是我們感覺它與傳統(tǒng)汽車最不相同的地方。從技術(shù)角度來說,谷歌使用的激光雷達(dá)加高清地圖的策略是可以實(shí)現(xiàn)完全自動駕駛的,這也是為什么從一開就沒設(shè)計(jì)方向盤和踏板,因?yàn)橥耆恍枰闳ヱ{駛。坐上它的第一感覺仍然好像是坐進(jìn)了一輛游樂場或是工業(yè)園區(qū)內(nèi)部的擺渡車,但是它行駛的是公共道路,車下也并沒有軌道。只要設(shè)定好目的地,“豆莢車”就會自動選擇路線并開始行駛。
這是與之前車輛比較大的不同,它是根據(jù)GPS路線自己行駛,而不是依靠車道線和前車進(jìn)行跟車。不過這輛小車的速度并不快,最快也就大概40km/h。由于沒有傳統(tǒng)汽車的逐漸過渡,一步到位需要將眾多安全因素都考慮在內(nèi),比如在行駛過程或者路口轉(zhuǎn)向時,只要系統(tǒng)探測到路邊有行人有過馬路的意圖,就會緩緩?fù)O碌却?,或者如果系統(tǒng)預(yù)測旁邊的自行車想要進(jìn)入車道,汽車也會減速讓行。所以,“豆莢車”給人的整體感覺是性格比較“膽小”、或者說特別“禮貌”,坐在上面興許還會有些著急。
不過谷歌逐漸意識到,作為一個科技公司,自主生產(chǎn)汽車硬件仍然過于挑戰(zhàn)性,所以后來放棄了這輛可愛的“豆莢車”,并于去年將其自動駕駛部門獨(dú)立出來建立了子公司W(wǎng)aymo,改變策略集中精力與主機(jī)廠合作,使用改造的雷克薩斯和克萊斯勒汽車進(jìn)行測試。
五:供應(yīng)商
而除了傳統(tǒng)主機(jī)廠之外,另一大自動駕駛研發(fā)陣營就是像大陸、博世、德爾福這些供應(yīng)商們。通過他們這些年“幕后”豐富的調(diào)教經(jīng)驗(yàn),同樣在自動駕駛系統(tǒng)中擁有自己的優(yōu)勢。這些供應(yīng)商的測試車使用的都是改裝的量產(chǎn)車,所以在感官上并沒有太多的不同,但是車內(nèi)可能會多了不少顯示屏、指示燈等?;竟δ芘c上一階段差不多,屬于在量產(chǎn)車中比較高級的,并在此基礎(chǔ)上有了一定程度的提升。

大陸自動駕駛測試車
就拿大陸來說,之前體驗(yàn)的時候因?yàn)閳龅厮?,車輛的速度其實(shí)并不快,基本處于30-40km/h之間,但最大速度其實(shí)可到130km/h。這套系統(tǒng)目前對于車道的識別還是依賴于車道線,在進(jìn)入有車道線的路段之后,車輛才進(jìn)入自動駕駛模式。在自主巡航系統(tǒng)中,一共使用了七個攝像頭,其中六個用于環(huán)境感知:前方的長距離雷達(dá),探測距離在250米;車輛四個角落分別安裝有一個短距離雷達(dá),用于監(jiān)測盲區(qū)及車后情況,并輔助車輛變道;還有一個雙目攝像頭,用于識別車道標(biāo)識及交通標(biāo)志。另外在車內(nèi)還有一個攝像頭,用于監(jiān)控駕駛員的狀態(tài)。
這輛自動駕駛測試車目前的狀態(tài)是在單車道內(nèi)的工作還是可以自主完成的,包括對方向盤、剎車與油門的控制,以及從車道線的軌跡變化上控制車輛始終處于車道中間的位置,當(dāng)出現(xiàn)彎道時也能控制車輛轉(zhuǎn)彎。不過在變道的時候還是需要駕駛員發(fā)出轉(zhuǎn)向指令的,比如打轉(zhuǎn)向燈,車輛就會根據(jù)轉(zhuǎn)向燈的信息換到相鄰的狀態(tài)下。
而在今年的CES上,英偉達(dá)豐田將使用Nvidia Drive PX人工智能汽車平臺開發(fā)可用于大規(guī)模量產(chǎn)的高級自動駕駛系統(tǒng)。隨著豐田的加入,英偉達(dá)已經(jīng)擁有奧迪、戴姆勒、大眾、豐田四家主機(jī)廠合作伙伴,還和沃爾沃、特斯拉以及蔚來汽車有相當(dāng)程度的合作。而在另外一個陣營,英特爾除了已經(jīng)收入麾下的Mobileye,還有包括百度、寶馬和德爾福等其他合作伙伴。所以,日后英偉達(dá)和英特爾兩個芯片巨頭領(lǐng)銜的陣營競爭也會愈來愈烈。
車云小結(jié)
其實(shí)自動駕駛所要追求的一方面是可以像人類操控一樣自如地參與交通,但同時另一方面還要保證駕駛的絕對安全性,這一點(diǎn)是我們對于自動駕駛更高一層的要求。做到這兩點(diǎn)之后,才能達(dá)到解放人類駕駛員的終極目的,尤其是不僅僅克服身體的疲勞,而是解放我們的精神壓力,而不是讓司機(jī)更加精神緊張。
而從體驗(yàn)上來說,自動駕駛做到完全讓人們放心、并像有人類駕駛員一樣的體驗(yàn)?zāi)壳叭员容^遙遠(yuǎn)。所以單從上文提到的第一方面來看,就仍然還沒有合格。但是我們也可以明顯看到這短短幾年內(nèi)自動駕駛?cè)〉玫某晒?,而且就科技指?shù)發(fā)展的規(guī)律來說,后期發(fā)展肯定也會越來越快。
另外我們也可以看出,在向量產(chǎn)車中部署自動駕駛功能的時候,有更多互聯(lián)網(wǎng)基因的科技公司與傳統(tǒng)的汽車主機(jī)廠還是有一些潛移默化的區(qū)別。傳統(tǒng)的公司對于最新技術(shù)的投放往往不像科技公司那樣積極,一方面來看,是傳統(tǒng)汽車行業(yè)更新?lián)Q代的理念本身比不上科技行業(yè),另一方面,汽車行業(yè)對于新技術(shù)普及的安全性和可靠性往往看得更重,畢竟涉及車輛的事故的危險性要遠(yuǎn)大于一些科技產(chǎn)品。不過,也正是這傳統(tǒng)的保守和創(chuàng)新的激進(jìn),才一起推動了科技的進(jìn)步。
本文轉(zhuǎn)載自車云網(wǎng)。
推薦閱讀:




