

【導(dǎo)讀】隨著對(duì)精度要求的不斷提高,全差分信號(hào)鏈組件因出色的性能脫穎而出,這類組件的一個(gè)主要優(yōu)點(diǎn)是可通過信號(hào)路由拾取噪聲抑制。由于輸出會(huì)拾取這種噪聲,輸出經(jīng)常會(huì)出現(xiàn)誤差并因而在信號(hào)鏈中進(jìn)一步衰減。
提問:我們可以使用儀表放大器生成差分輸出信號(hào)嗎?
隨著對(duì)精度要求的不斷提高,全差分信號(hào)鏈組件因出色的性能脫穎而出,這類組件的一個(gè)主要優(yōu)點(diǎn)是可通過信號(hào)路由拾取噪聲抑制。由于輸出會(huì)拾取這種噪聲,輸出經(jīng)常會(huì)出現(xiàn)誤差并因而在信號(hào)鏈中進(jìn)一步衰減。
此外,差分信號(hào)可以實(shí)現(xiàn)兩倍于同一電源上的單端信號(hào)的信號(hào)范圍。因此,全差分信號(hào)的信噪比(SNR)更高。經(jīng)典的三運(yùn)放儀表放大器具有許多優(yōu)點(diǎn),包括共模信號(hào)抑制、高輸入阻抗和精確(可調(diào))增益;但是,在需要全差分輸出信號(hào)時(shí),它就無能為力了。人們已經(jīng)使用一些方法,用標(biāo)準(zhǔn)組件實(shí)現(xiàn)全差分儀表放大器。但是,它們有著各自的缺點(diǎn)。
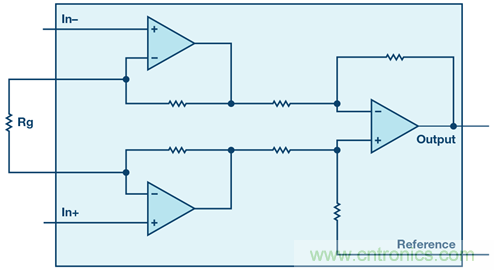
圖1. 經(jīng)典儀表放大器
一種技術(shù)是使用運(yùn)算放大器驅(qū)動(dòng)參考引腳,正輸入為共模,負(fù)輸入為將輸出連接在一起的兩個(gè)匹配電阻的中心。該配置使用儀表放大器輸出作為正輸出,運(yùn)算放大器輸出作為負(fù)輸出。由于兩個(gè)輸出是不同的放大器,因此這些放大器之間動(dòng)態(tài)性能的失配會(huì)極大地影響電路的整體性能。
此外,兩個(gè)電阻的匹配導(dǎo)致輸出共模隨輸出信號(hào)運(yùn)動(dòng),結(jié)果可能導(dǎo)致失真。在設(shè)計(jì)該電路時(shí),在選擇放大器時(shí)必須考慮穩(wěn)定性,并且可能需要在運(yùn)算放大器上設(shè)置一個(gè)反饋電容,用于限制電路的總帶寬。最后,該電路的增益范圍取決于儀表放大器。因此,不可能實(shí)現(xiàn)小于1的增益。
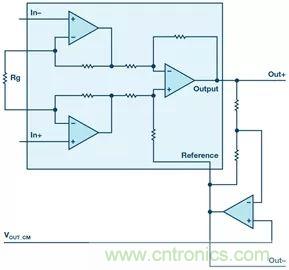
圖2. 使用外部運(yùn)算放大器生成反相輸出
另一種技術(shù)是將兩個(gè)儀表放大器與輸入開關(guān)并聯(lián)。與前一電路相比,這種配置具有更好的匹配驅(qū)動(dòng)電路和頻率響應(yīng)。但它不能實(shí)現(xiàn)小于2的增益。該電路還需要精密匹配增益電阻,以實(shí)現(xiàn)純差分信號(hào)。這些電阻的失配會(huì)導(dǎo)致輸出共模電平的變化,其影響與先前的架構(gòu)相同。
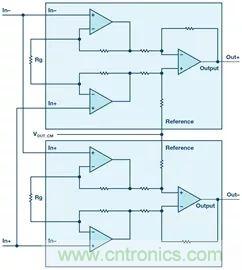
圖3. 使用第二儀表放大器產(chǎn)生反相輸出
這兩種方法對(duì)可實(shí)現(xiàn)的增益以及匹配組件的要求存在限制。
新型交叉連接技術(shù)
通過交叉連接兩個(gè)儀表放大器,如圖4所示,這種新電路使用單個(gè)增益電阻提供具有精密增益或衰減的全差分輸出。通過將兩個(gè)參考引腳連接在一起,用戶可以根據(jù)需要調(diào)整輸出共模。
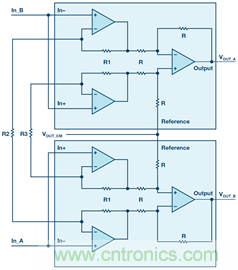
圖4. 交叉連接技術(shù)——生成差分儀表放大器輸出的解決方案
In_A的增益由以下等式推出。由于輸入電壓出現(xiàn)在儀表放大器2的輸入緩沖器的正端子上,而電阻R2和R3另一端的電壓為0 V,因此這些緩沖器的增益遵循適用于同相運(yùn)算放大器配置的等式。同樣,對(duì)于儀表放大器1的輸入緩沖器,增益遵循反相運(yùn)算放大器配置。由于差分放大器中的所有電阻都匹配,因此緩沖器輸出的增益為1。
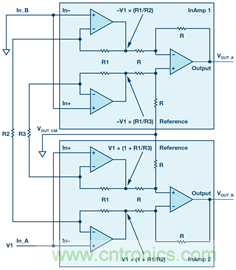
圖5. 儀表放大器內(nèi)部的匹配電阻是交叉連接技術(shù)的關(guān)鍵
根據(jù)對(duì)稱性原則,如果在In_B施加電壓V2且In_A接地,則結(jié)果如下:
將這兩個(gè)結(jié)果相加得到電路的增益。

增益電阻R3和R2設(shè)置電路的增益,并且只需要一個(gè)電阻來實(shí)現(xiàn)全差分信號(hào)。正/負(fù)輸出取決于安裝的電阻。不安裝R3將導(dǎo)致增益等式中的第二項(xiàng)變?yōu)榱恪S纱丝傻?,增益? × R1/R2。不安裝R2會(huì)導(dǎo)致增益等式中的第一項(xiàng)變?yōu)榱?。由此可得,增益?ndash;2 × R1/R3。需要注意的另一點(diǎn)是增益純粹是一個(gè)比率,因此可以實(shí)現(xiàn)小于1的增益。請(qǐng)記住,由于R2和R3對(duì)增益有相反的影響,所以,使用兩個(gè)增益電阻會(huì)使第一級(jí)增益高于輸出。如果在選擇電阻值時(shí)不小心,結(jié)果會(huì)加大由于第一級(jí)運(yùn)算放大器在輸出端引起的偏差。
為了演示這個(gè)電路的實(shí)際運(yùn)用情況,我們把兩個(gè) AD8221 儀表放大器連接起來。數(shù)據(jù)手冊將R1列為24.7kΩ,因此當(dāng)R2為49.4kΩ時(shí),可實(shí)現(xiàn)等于1的增益。
CH1是In_A的輸入信號(hào),CH2為VOUT_A,CH3為VOUT_B。輸出A和B匹配且反相,差值在幅度上等于輸入信號(hào)。
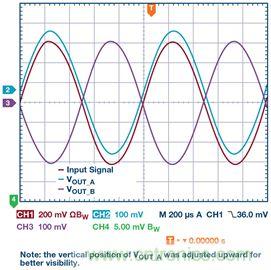
圖6. 使用交叉連接技術(shù)生成差分儀表放大器輸出信號(hào),在增益 = 1的條件下測得的結(jié)果
接下來,將49.4kΩ增益電阻從R2移至R3,電路的新增益為–1?,F(xiàn)在Out_A與輸入反相,輸出之間的差值在幅度上等于輸入信號(hào)。
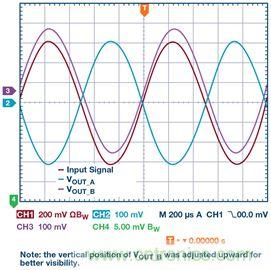
圖7. 使用交叉連接技術(shù)生成差分儀表放大器輸出信號(hào),在增益 = –1的生成長圖條件下測得的結(jié)果。
如前所述,其他技術(shù)的一個(gè)限制是無法實(shí)現(xiàn)衰減。根據(jù)增益等式,使用R2 = 98.8kΩ,電路會(huì)使輸入信號(hào)衰減兩倍。
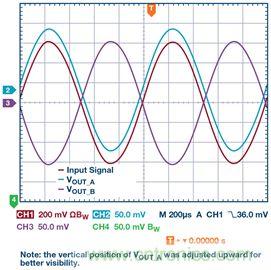
圖8. 使用交叉連接技術(shù)生成差分儀表放大器輸出信號(hào),在增益 = 1/2的條件下測得的結(jié)果
最后,為了證明高增益,選擇R2 = 494Ω以實(shí)現(xiàn)G = 100。
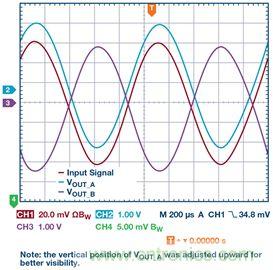
圖9. 使用交叉連接技術(shù)生成差分儀表放大器輸出信號(hào)儀表放大器,在增益 = 100條件下測得的結(jié)果。
該電路的性能表現(xiàn)符合增益等式的描述。為了獲得最佳性能,使用此電路時(shí)應(yīng)采取一些預(yù)防措施。增益電阻的精度和漂移會(huì)增加儀表放大器的增益誤差,因此要根據(jù)誤差要求選擇合適的容差。
由于儀表放大器的Rg引腳上的電容可能導(dǎo)致較差的頻率性能,因此如果需要高頻性能,應(yīng)注意這些節(jié)點(diǎn)。此外,兩個(gè)儀表放大器之間的溫度失配會(huì)因失調(diào)漂移導(dǎo)致系統(tǒng)失調(diào),因此在此應(yīng)注意布局和負(fù)載。使用雙通道儀表放大器,如 AD8222 ,有助于克服這些潛在的問題。
結(jié) 論
交叉連接技術(shù)保持儀表放大器的所需特性,同時(shí)提供附加功能。盡管本文討論的所有示例都實(shí)現(xiàn)了差分輸出,但在交叉連接電路中,輸出的共模不會(huì)受電阻對(duì)失配的影響,與其他架構(gòu)不同。因此,始終都能實(shí)現(xiàn)真正的差分輸出。而且,如增益等式所示,差分信號(hào)衰減是可能存在的,這就消除了采用漏斗放大器的必要性,在以前,這是必不可少的。最后,輸出的極性由增益電阻的位置決定(使用R2或R3),這為用戶增加了更多的靈活性。
推薦閱讀:




