
【導(dǎo)讀】據(jù)麥姆斯咨詢報道,無人機(jī)的市場規(guī)模和應(yīng)用范圍正在蓬勃發(fā)展,似乎每隔一天就會出現(xiàn)新的應(yīng)用。無論是郵件或包裹的遞送、老少皆宜的娛樂、安全監(jiān)控、農(nóng)業(yè)或工業(yè)的管理,還是開拓航拍攝影的新天地,隨處都可見無人機(jī)的身影。
最初,大多數(shù)無人機(jī)不過是簡單的玩具。然而,最近它們的飛行能力有了顯著地提高,讓它們的操控更安全、更穩(wěn)定、更容易,從而使它們在現(xiàn)實(shí)生活中的應(yīng)用也越來越廣泛。
這些能力提高的關(guān)鍵因素是使用了高性能的微機(jī)電系統(tǒng)(MEMS)傳感器,因而無人機(jī)中的傳感器市場正在快速地增長:根據(jù)Yole《應(yīng)用于無人機(jī)和機(jī)器人的傳感器》報告數(shù)據(jù),應(yīng)用于無人機(jī)和機(jī)器人的傳感器市場增長強(qiáng)勁,預(yù)計到2021年將達(dá)到7.09億美元,2018年到2021年的復(fù)合年增長率為12.4%。
影響無人機(jī)飛行性能的MEMS傳感器
無人機(jī)能夠保持方向穩(wěn)定、被用戶精準(zhǔn)操控,或者自動飛行,都依賴于慣性MEMS傳感器。然而,無人機(jī)面臨的一些挑戰(zhàn)使其系統(tǒng)設(shè)計變得復(fù)雜:電機(jī)校準(zhǔn)得不夠完美、系統(tǒng)動力隨負(fù)載不同而變化、運(yùn)行條件迅速變換,或者傳感器引入不準(zhǔn)確的信息。這些都可能導(dǎo)致定位處理產(chǎn)生偏差,最終導(dǎo)致導(dǎo)航時出現(xiàn)位置錯誤,甚至導(dǎo)致無人機(jī)故障。
要讓無人機(jī)不只是玩具,甚至“更上一層樓”,配備高性能的MEMS傳感器和先進(jìn)的軟件是必不可少的。高級無人機(jī)上高精度的慣性測量單元(IMU)、氣壓傳感器、磁力計、專用傳感器節(jié)點(diǎn)(ASSN)以及傳感器之間的數(shù)據(jù)融合,都對其飛行性能有直接和實(shí)質(zhì)性的影響。
受尺寸限制以及苛刻的環(huán)境和運(yùn)行條件,如溫度波動和振動,都對傳感器的要求提升到新的水平。MEMS傳感器必須盡可能地減少這些影響,并提供精準(zhǔn)可靠的測量。
實(shí)現(xiàn)卓越的飛行性能的方法主要有:軟件算法(如傳感器校準(zhǔn)和數(shù)據(jù)融合)、機(jī)械系統(tǒng)設(shè)計(如減少振動),以及根據(jù)無人機(jī)制造商的要求和需求選擇MEMS傳感器。下面我們通過一些實(shí)例重點(diǎn)關(guān)注一下MEMS傳感器。
航姿參考系統(tǒng)(AHRS)是無人機(jī)的“心臟”,它包括慣性傳感器、磁力計和處理單元。AHRS可預(yù)估設(shè)備的行進(jìn)方向,如滾轉(zhuǎn)、俯仰和偏航的角度。傳感器的不準(zhǔn)確性,如偏移、靈敏度誤差或熱漂移,會導(dǎo)致定向誤差。圖1顯示了定向誤差(滾動、俯仰角度)與加速度計偏移的函數(shù)關(guān)系,定向誤差通常是傳感器誤差鏈中最大的因素。例如,僅20 mg的加速度偏移量將導(dǎo)致設(shè)備出現(xiàn)1度的方向誤差。
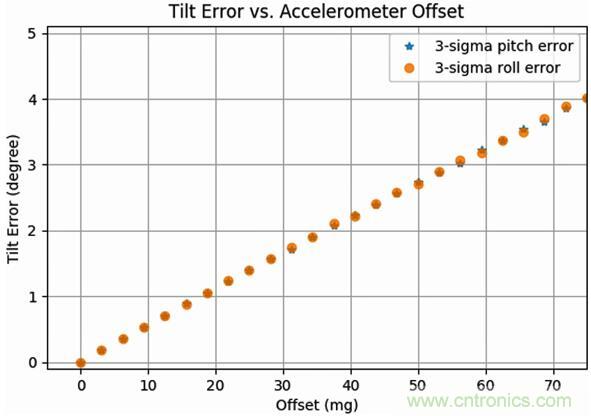
圖1:加速度計偏移引起的方向誤差
慣性測量單元(IMU)
IMU包括加速度計和陀螺儀,并帶有嵌入式處理程序。這使它能夠確定運(yùn)動軌跡,包括線性運(yùn)動和旋轉(zhuǎn)。
Bosch Sensortec的BMI088是一款6軸IMU,具有16位低噪聲加速度計和16位低漂移陀螺儀。這種高精度器件的技術(shù)源自高端汽車傳感器,因此它可以在較長時間內(nèi)保持出色的偏置和溫度穩(wěn)定性,以及具有卓越的振動魯棒性,使其成為無人機(jī)的理想選擇。
圖2顯示了BMI088隨溫度漂移的典型值。
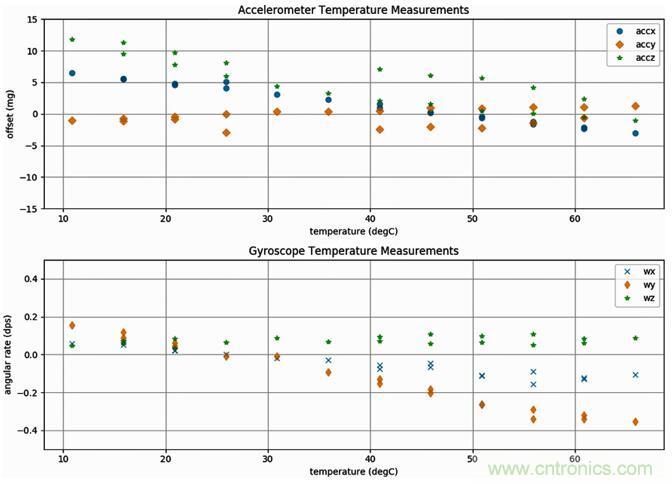
圖2:BMI088隨溫度漂移的典型值(加速度和速率都為0)
所示的漂移量表示加速度計偏移的范圍在10 mg以內(nèi)和陀螺儀的偏移范圍小于0.5 dps。此外,BMI088行為表現(xiàn)與溫度呈線性關(guān)系,且?guī)缀鯖]有滯后現(xiàn)象。這使得BMI088在無人機(jī)和機(jī)器人中應(yīng)用極具吸引力。
氣壓傳感器
無人機(jī)內(nèi)置的高性能氣壓傳感器能精確測量高度,并可與IMU的讀數(shù)結(jié)合用于高度控制。氣壓傳感器必須盡可能減少外部的影響和誤差。目前,與其他傳感器,例如GPS和光流傳感器、測距傳感器結(jié)合使用,可提高系統(tǒng)的可靠性并減少位置誤差。
Bosch Sensortec的BMP388氣壓傳感器用于提供高度信息,可改善飛行穩(wěn)定性、高度控制、起飛和著陸的性能。這使得操控?zé)o人機(jī)變得輕而易舉,因此能吸引到更廣泛的用戶。
無人機(jī)對氣壓傳感器的要求通常極端苛刻。即便遭受不良天氣和氣溫影響,高度精度也必須控制在嚴(yán)格的公差范圍內(nèi),另外隨時間推移傳感器必須保持低延遲和微乎其微的漂移量。BMP388能夠滿足這些嚴(yán)苛的要求,其相對精度為+/- 0.08 hPa(+/- 0.66 m),300至1100 hPa之間的絕對精度在+/- 0.5 hPa,低溫度系數(shù)補(bǔ)償(TCO)通常小于0.75 Pa/K。它擁有極具吸引力的性價比,功耗低且封裝尺寸極小,僅為2.0mm x 2.0mm x 0.75mm。
除了改善TCO之外,還有多種因素可以提高整體的精度:相對精度、噪聲、穩(wěn)定性和絕對精度。從笨拙的玩具到高精度飛行器,當(dāng)前無人機(jī)在工業(yè)和商業(yè)創(chuàng)新應(yīng)用中的潛力超越了工程師們的想像。
磁力計
磁力計就像是指南針,可以根據(jù)地球的磁場為無人機(jī)確立航向。正如Bosch Sensortec的BMM150,正是一款3軸的數(shù)字磁力計。
BMM150,結(jié)合BMI088 IMU,可提供9個自由度(DoF)的解決方案,用于航向估算和導(dǎo)航。BMM150在很寬的溫度范圍內(nèi)都能保持良好性能,具有16位分辨率和抗強(qiáng)磁場能力(無磁化提供穩(wěn)定的傳感器偏移),因而非常適合無人機(jī)應(yīng)用,并能夠最大限度地減少校準(zhǔn)傳感器偏移所需的工作量。
專用傳感器節(jié)點(diǎn)
專用傳感器節(jié)點(diǎn)(ASSN)是指高度集成的智能傳感集線器,它能將多個傳感器集成在一個封裝體中,并配有可編程的微控制器。它為運(yùn)動傳感應(yīng)用提供靈活而低功耗的解決方案。
例如,Bosch Sensortec的BMF055就是一款A(yù)SSN,它集成了加速度計、陀螺儀、磁力計、可處理軟件的32位Cortex M0+微控制器,以及各傳感器的輸出端。BMF055與定向處理軟件相結(jié)合,可用作AHRS。該器件采用5.2mm x 3.8mm x 1.1mm小型封裝,節(jié)省了寶貴的空間和重量。該傳感器為無人機(jī)應(yīng)用提供了一體化封裝。圖3演示了BMF055在無人機(jī)中的應(yīng)用,其作為定向處理單元并集成了傳感器融合算法。
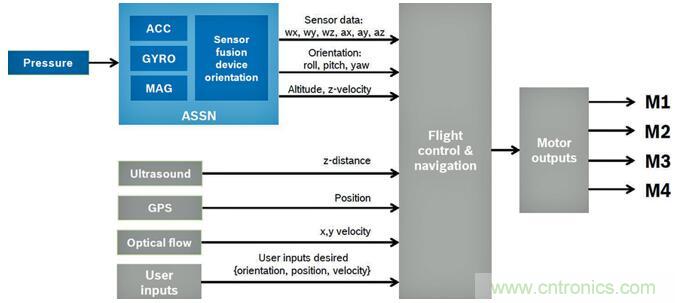
圖3:BMF055(ASSN)在無人機(jī)中AHRS應(yīng)用
信號處理和軟件
除了各個傳感器之外,我們還可以了解一下無人機(jī)的信號處理整體結(jié)構(gòu)的系統(tǒng)示意圖,以及集成傳感器讀數(shù)和控制所需的軟件。
圖4顯示了典型的消費(fèi)級無人機(jī)中用于不同信號處理的功能模塊。左側(cè)列顯示為各個傳感器,右側(cè)列表示其派生的軟件處理功能,如方向處理和飛行控制算法。深藍(lán)色方塊的傳感器是實(shí)現(xiàn)室內(nèi)和玩具無人機(jī)的最佳穩(wěn)定控制必不可少的傳感器,灰色方塊則表示可選傳感器,可用于擴(kuò)展室外飛行和自動航點(diǎn)導(dǎo)航功能。
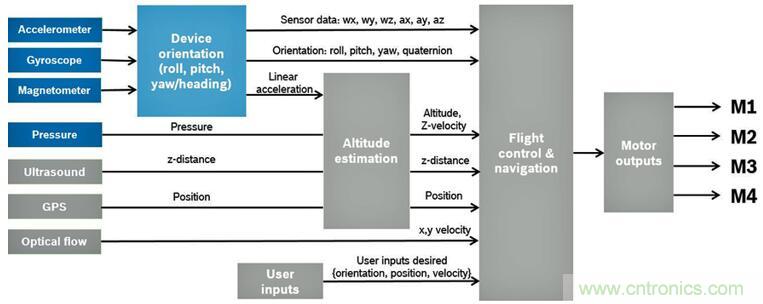
圖4:消費(fèi)級無人機(jī)的信號處理示意圖
將各種傳感器集成一體,并進(jìn)行數(shù)據(jù)融合,就可以直接在芯片上執(zhí)行定向處理等軟件功能。除了MEMS傳感器,Bosch Sensortec還提供用于定向處理的傳感器數(shù)據(jù)融合軟件,功能包括傳感器校準(zhǔn)、傳感器數(shù)據(jù)的預(yù)處理和定向處理。對于無人機(jī)制造商而言,這可以顯著地降低工程和軟件的復(fù)雜性,減少不必要的風(fēng)險并縮短產(chǎn)品上市時間。
然而,制造商仍然需要為無人機(jī)的機(jī)械設(shè)計和動力系統(tǒng),提供他們自己的軟件和特殊代碼,例如控制回路和特定功能的使用。
典型的無人機(jī)功能
讓我們來看看創(chuàng)新的MEMS傳感器技術(shù)如何與軟件相結(jié)合,實(shí)現(xiàn)現(xiàn)代無人機(jī)功能?,F(xiàn)在,即便是低成本的玩具無人機(jī),也普遍具有復(fù)雜的功能。首先,通過利用IMU的輸出,穩(wěn)定器能將無人機(jī)保持水平。通過集成來自氣壓傳感器的數(shù)據(jù),能夠?qū)o人機(jī)維持高度和位置不變。例如,在玩具應(yīng)用中,它可控制無人機(jī)在高度不變時進(jìn)行翻轉(zhuǎn)。結(jié)果是操控師不再需要花費(fèi)那么多小時的練習(xí)來掌握基本操控,且會顯著降低發(fā)生意外碰撞的風(fēng)險。
與GPS模塊的數(shù)據(jù)融合為無人機(jī)戶外飛行增添一些有趣的功能,例如,在幾個航點(diǎn)之間自動飛行,以及“返回家”功能——無人機(jī)能夠自動返回并安全降落到起始位置。
其他新穎的功能還包括“軌道模式”或“跟隨我模式”,無人機(jī)可以圍繞特定點(diǎn)旋轉(zhuǎn)或可以自主跟隨一個人。與攝像頭相結(jié)合,操控師可以在“帶著無人機(jī)散步”時,從“鳥瞰視圖”中看到自己,或者通過手勢與無人機(jī)互動。
海闊天空任我游
隨著機(jī)器人、半導(dǎo)體和當(dāng)前的MEMS傳感器技術(shù)的發(fā)展,尤其是不斷提升的精密度和小型化,預(yù)示著在未來無人遙控飛機(jī)將更為普及。從天氣或空氣污染物的監(jiān)測、牲畜的管理、安全或快遞系統(tǒng)到下一代增強(qiáng)現(xiàn)實(shí)游戲或物聯(lián)網(wǎng)(IoT)平臺,高科技的飛機(jī)和無人機(jī)在我們的日常生活中發(fā)揮的作用越來越重要,而博世MEMS傳感器將為它們鑄造強(qiáng)大的“心臟”。
推薦閱讀:


