

【導(dǎo)讀】低功耗可利用MEMS加速計(jì)(Accelerometer)傳感器來(lái)增加電池壽命。傳感器變得越來(lái)越省電,所嵌入的各種功能也有助于減少整體系統(tǒng)能耗。舉例來(lái)說(shuō),當(dāng)用戶不使用該裝置時(shí),動(dòng)作感應(yīng)喚醒功能讓整個(gè)系統(tǒng)保持休眠狀態(tài)。不過(guò)還有很多其他的可能性,利用MEMS加速計(jì)來(lái)減少整體功耗。
從MEMS加速計(jì)傳感器本身出發(fā),其操作模式就應(yīng)該具有靈活性。如圖1所示,我們知道傳感器的分辨率以及輸出數(shù)據(jù)速率,相對(duì)于另一方面的電流消耗,兩者之間必須有所折中——分辨率或數(shù)據(jù)速率越高,電流消耗就越大,反之亦然。所幸市面上的一些傳感器只需在很少的微安環(huán)境下就能運(yùn)行,在關(guān)閉電源或待機(jī)模式下也只會(huì)消耗幾納米安的電力。
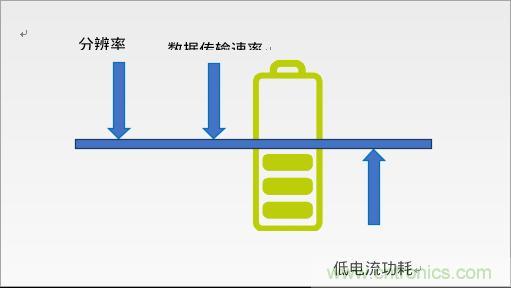
圖1:傳感器參數(shù)影響了電池壽命
針對(duì)一些高要求的應(yīng)用程序,傳感器的運(yùn)行模式可以迅速更換,只在真正有需要時(shí),才會(huì)提高分辨率和數(shù)據(jù)傳輸速率。有些傳感器甚至能夠自動(dòng)轉(zhuǎn)換模式??蛻艨勺孕信渲没顒?dòng)狀態(tài)下所需要的分辨率和數(shù)據(jù)傳輸速率,并自定義啟動(dòng)它的條件。這時(shí)傳感器會(huì)進(jìn)入靜止?fàn)顟B(tài),但仍會(huì)繼續(xù)測(cè)量數(shù)據(jù),并以極低的數(shù)據(jù)傳輸速率和分辨率進(jìn)行,等出現(xiàn)設(shè)定條件(動(dòng)作事件)才切換回到啟動(dòng)狀態(tài)。
另一個(gè)不錯(cuò)的設(shè)計(jì)原則是利用低供電水平,因?yàn)檩^低的供電水平也意味著更低的電流消耗。這就是為什么對(duì)于低功率的應(yīng)用,1.8V電源是首選。
在某些設(shè)計(jì)中,可以使用傳感器的功率循環(huán)。傳感器的電源只有在需要測(cè)量時(shí)才會(huì)被激活,否則傳感器就會(huì)處于關(guān)閉狀態(tài)。我們可以通過(guò)從微控制器的引腳上提供傳感器的電源來(lái)實(shí)現(xiàn)。如圖2所示。在應(yīng)用這種技術(shù)時(shí),需要正確的計(jì)算功耗預(yù)算,因?yàn)槊總€(gè)傳感器的啟動(dòng)都需要對(duì)其進(jìn)行配置和等待,直到輸出被確定,并提供正確的數(shù)據(jù)。
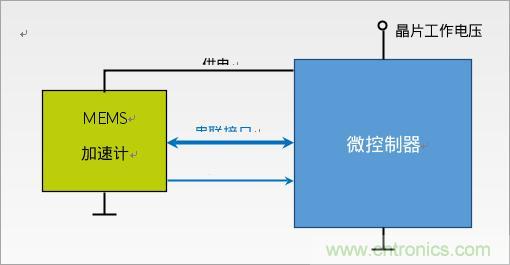
圖2:透過(guò)為控制微控制器針腳控制傳感器電源供應(yīng)
大多數(shù)MEMS加速計(jì)都是數(shù)字傳感器,這代表它們可以將測(cè)量的模擬信號(hào)轉(zhuǎn)換成數(shù)字?jǐn)?shù)據(jù)。因?yàn)橛屑傻哪M信號(hào)轉(zhuǎn)換器,加上對(duì)信號(hào)失真的敏感度較低,物料清單項(xiàng)目得以減少,但這并不是唯一的優(yōu)點(diǎn)。嵌入的中斷生成器MEMS加速計(jì)可以在滿足用戶設(shè)定的參數(shù)條件發(fā)生時(shí),產(chǎn)生觸發(fā)信號(hào),這就是用動(dòng)作感應(yīng)喚醒功能的方式。微控制器(MCU)配置傳感器來(lái)產(chǎn)生一個(gè)喚醒觸發(fā)器,并進(jìn)入功耗極低的睡眠模式。當(dāng)一個(gè)動(dòng)作被檢測(cè)到是,傳感器會(huì)產(chǎn)生一個(gè)中斷信號(hào),MCU接到信號(hào)后會(huì)切換到一個(gè)合適的操作模式,然后處理剛剛發(fā)生的情況。
數(shù)字傳感器也可以接管有微控制器執(zhí)行的運(yùn)動(dòng)處理有關(guān)的任務(wù)。MCU當(dāng)然可以執(zhí)行相同的工作,但是功率效率要低得多——MCU的耗電是一毫安計(jì)算,傳感器則是微安。檢測(cè)自由落體、單點(diǎn)、雙擊(用戶動(dòng)作類(lèi)似鼠標(biāo)點(diǎn)擊)、人像/景觀方向檢測(cè)等,是通過(guò)傳感器內(nèi)部邏輯實(shí)現(xiàn)的。MCU不需要進(jìn)行任何計(jì)算,只需要等待一個(gè)中斷觸發(fā),并且只在它發(fā)生時(shí)對(duì)動(dòng)作作出反應(yīng)。
數(shù)字傳感器經(jīng)常集成可配置的過(guò)濾器,這些過(guò)濾器是用來(lái)測(cè)量加速度數(shù)據(jù)的??墒褂玫屯?low-pass)、高通(high-pass)甚至是犯混疊過(guò)濾器,用于MCU預(yù)處理數(shù)據(jù),并增加卸載分流。
嵌入傳感器的數(shù)據(jù)緩沖器大多屬于先進(jìn)先出(FIFO)的類(lèi)型,因?yàn)樗梢宰孧CU減少讀取數(shù)據(jù)的頻率,因此降低當(dāng)前電流消耗。這樣微控制器就可以執(zhí)行其他任務(wù)、延長(zhǎng)休眠時(shí)間,同時(shí)也節(jié)省了與傳感器串口通訊所需的時(shí)間。
傳感器與微控制器之間的串行通信也會(huì)增加整體功耗。對(duì)超低功耗的應(yīng)用來(lái)說(shuō),每處理一個(gè)微安倍,串行通信都有可能產(chǎn)生重大影響。大多數(shù)MEMS加速計(jì)都是通過(guò)串行外設(shè)接口(SPI)和I2C接口進(jìn)行通信的。SPI接口在功耗方面效率更高,原因有三:一是通信線路上沒(méi)有會(huì)造成額外電流消耗的引線;二是支持更高的數(shù)據(jù)率;三是串行協(xié)議的開(kāi)銷(xiāo)減少。
無(wú)論使用哪種接口,我們還是可以大幅減少串行通信,方法是讓?xiě)?yīng)用程序利用數(shù)據(jù)準(zhǔn)備中斷(data ready interrupt),而不進(jìn)行傳感器輪詢(polling),也就是持續(xù)請(qǐng)求新數(shù)據(jù)的可用性狀態(tài)。當(dāng)傳感器完成數(shù)據(jù)測(cè)量和轉(zhuǎn)換后,數(shù)據(jù)準(zhǔn)備中斷自動(dòng)生成,新的數(shù)據(jù)集將由MCU讀取。當(dāng)這個(gè)中斷被激活時(shí),MCU會(huì)馬上通過(guò)單一的讀取動(dòng)作,讀取來(lái)自傳感器的輸出數(shù)據(jù)。
如前文所述,傳感器輸出的數(shù)據(jù)率較低,意味著當(dāng)前的耗電量較低,因此,所謂的單數(shù)據(jù)轉(zhuǎn)換機(jī)制可以是傳感器與應(yīng)用程序所需的數(shù)據(jù)完美匹配,如圖三所示。使用這種機(jī)制,要么是由傳感器引腳上的外部觸發(fā)信號(hào),要么是由使用串行指令從MCU發(fā)起的寄存器寫(xiě)入。這樣獲得的數(shù)據(jù)就會(huì)存儲(chǔ)在傳感器中。傳感器還可以啟動(dòng)一個(gè)數(shù)據(jù)準(zhǔn)備中斷信號(hào),通知MCU數(shù)據(jù)轉(zhuǎn)換已經(jīng)完成,現(xiàn)在可以通過(guò)應(yīng)用程序讀取數(shù)據(jù)。有了這個(gè)功能,無(wú)論是低于1Hz,還是任何預(yù)先定義范圍以外的數(shù)據(jù)速率都可以實(shí)現(xiàn)。
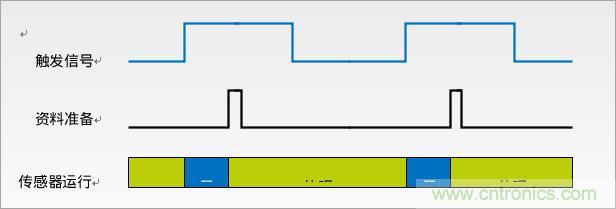
圖3:?jiǎn)我粩?shù)據(jù)轉(zhuǎn)換機(jī)制
本文討論了對(duì)低功耗應(yīng)用相當(dāng)重要的MEMS加速儀傳感器功能,以及如何將之利用在系統(tǒng)設(shè)計(jì)上。意法半導(dǎo)體最新推出的LIS2DW12超低功耗3軸MEMS加速儀,能利用加速儀傳感器為新型應(yīng)用程序的設(shè)計(jì)帶來(lái)靈活性,因?yàn)樗娏飨淖畹涂蛇_(dá)1Ua,加上多個(gè)運(yùn)行模塊、輸出數(shù)據(jù)速率范圍極廣、豐富的嵌入式、高溫穩(wěn)定度和各種強(qiáng)化功能,例如數(shù)位過(guò)濾器和先進(jìn)先出緩沖器。我們相信許多低功耗應(yīng)用都能享受LIS2DW12的優(yōu)點(diǎn)。這款傳感器將為用戶提供優(yōu)勢(shì),尤其是在一下領(lǐng)域:動(dòng)作感應(yīng)功能與用戶界面、手持式裝備智能節(jié)能功能、電器相關(guān)動(dòng)作監(jiān)測(cè),還有無(wú)線傳感器節(jié)點(diǎn)的撞擊識(shí)別登錄(impact recognition logging)。
推薦閱讀:


